好久木有写OpenCV代码了,查了半天手册才知道缩放函数的使用方法。。。
慢慢来,这次先带来彩色数据的显示,代码托管在Github上(如果无法打开说明还未上传)。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 |
// ColorBasic-OpenCV.cpp : 定义控制台应用程序的入口点。 /**************************************************** 程序功能:Kinect V2彩色数据用OpenCV显示 开发环境:win32控制台应用程序 x86程序 (程序类型) VisualStudio 2012 (开发工具) OpenCV2.4.10 (显示界面库 vc11库, http://brightguo.com/opencv) KinectSDK-v2.0-PublicPreview1409-Setup (Kinect SDK驱动版本, http://brightguo.com/kinect2) Windows 8.1 (操作系统) 博客文章:http://brightguo.com/kinectv2-color-opencv 代码地址:https://github.com/guoming0000/KinectV2/tree/master/ColorBasic-OpenCV 开发人员:小明 开发时间:2014-10-13~ 2014-10-14 联系方式: i@guoming.me (邮箱,推荐联系方式) http://brightguo.com (网站,体感资讯和知识汇总) http://weibo.com/guoming0000 (新浪微博,请勿私信) ******************************************************/ #include "stdafx.h" #include "opencv2/opencv.hpp" #include <windows.h> #include <Kinect.h>// Kinect Header files using namespace cv; // Safe release for interfaces template<class Interface> inline void SafeRelease(Interface *& pInterfaceToRelease) { if (pInterfaceToRelease != NULL) { pInterfaceToRelease->Release(); pInterfaceToRelease = NULL; } } //定义Kinect方法类 class Kinect { public: static const int cColorWidth = 1920; static const int cColorHeight = 1080; Kinect(); ~Kinect(); HRESULT InitKinect();//初始化Kinect void Update();//更新数据 void ProcessColor(RGBQUAD* pBuffer, int nWidth, int nHeight);//处理得到的数据 private: IKinectSensor* m_pKinectSensor;// Current Kinect IColorFrameReader* m_pColorFrameReader;// Color reader RGBQUAD* m_pColorRGBX; }; //主函数 int main() { Kinect kinect; kinect.InitKinect(); while(1) { kinect.Update(); if(waitKey(1) >= 0)//按下任意键退出 { break; } } return 0; } Kinect::Kinect() { m_pKinectSensor = NULL; m_pColorFrameReader = NULL; m_pColorRGBX = new RGBQUAD[cColorWidth * cColorHeight];// create heap storage for color pixel data in RGBX format } Kinect::~Kinect() { if (m_pColorRGBX) { delete [] m_pColorRGBX; m_pColorRGBX = NULL; } SafeRelease(m_pColorFrameReader);// done with color frame reader if (m_pKinectSensor) { m_pKinectSensor->Close();// close the Kinect Sensor } SafeRelease(m_pKinectSensor); } HRESULT Kinect::InitKinect() { HRESULT hr; hr = GetDefaultKinectSensor(&m_pKinectSensor); if (FAILED(hr)) { return hr; } if (m_pKinectSensor) { // Initialize the Kinect and get the color reader IColorFrameSource* pColorFrameSource = NULL; hr = m_pKinectSensor->Open(); if (SUCCEEDED(hr)) { hr = m_pKinectSensor->get_ColorFrameSource(&pColorFrameSource); } if (SUCCEEDED(hr)) { hr = pColorFrameSource->OpenReader(&m_pColorFrameReader); } SafeRelease(pColorFrameSource); } if (!m_pKinectSensor || FAILED(hr)) { printf("No ready Kinect found! \n"); return E_FAIL; } return hr; } void Kinect::Update() { if (!m_pColorFrameReader) { return; } IColorFrame* pColorFrame = NULL; HRESULT hr = m_pColorFrameReader->AcquireLatestFrame(&pColorFrame); if (SUCCEEDED(hr)) { IFrameDescription* pFrameDescription = NULL; int nWidth = 0; int nHeight = 0; ColorImageFormat imageFormat = ColorImageFormat_None; UINT nBufferSize = 0; RGBQUAD *pBuffer = NULL; if (SUCCEEDED(hr)) { hr = pColorFrame->get_FrameDescription(&pFrameDescription); } if (SUCCEEDED(hr)) { hr = pFrameDescription->get_Width(&nWidth); } if (SUCCEEDED(hr)) { hr = pFrameDescription->get_Height(&nHeight); } if (SUCCEEDED(hr)) { hr = pColorFrame->get_RawColorImageFormat(&imageFormat); } if (SUCCEEDED(hr)) { if (imageFormat == ColorImageFormat_Bgra) { hr = pColorFrame->AccessRawUnderlyingBuffer(&nBufferSize, reinterpret_cast<BYTE**>(&pBuffer)); } else if (m_pColorRGBX) { pBuffer = m_pColorRGBX; nBufferSize = cColorWidth * cColorHeight * sizeof(RGBQUAD); hr = pColorFrame->CopyConvertedFrameDataToArray(nBufferSize, reinterpret_cast<BYTE*>(pBuffer), ColorImageFormat_Bgra); } else { hr = E_FAIL; } } if (SUCCEEDED(hr)) { ProcessColor(pBuffer, nWidth, nHeight); } SafeRelease(pFrameDescription); } SafeRelease(pColorFrame); } void Kinect::ProcessColor(RGBQUAD* pBuffer, int nWidth, int nHeight) { // Make sure we've received valid data if (pBuffer && (nWidth == cColorWidth) && (nHeight == cColorHeight)) { // Draw the data with OpenCV Mat ColorImage(nHeight, nWidth, CV_8UC4, pBuffer); Mat showImage; resize(ColorImage, showImage, Size(nWidth / 2, nHeight / 2)); imshow("ColorImage", showImage);////imshow("ColorImage", ColorImage); } } |
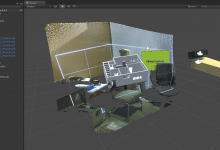
最终运行效果截图:
![[转]利用Kinect把任意屏幕变得可触控-李逍遥说说](http://brightguo.com/wp-content/uploads/2017/04/o_wite-220x150.png)


![[转]基于kinect的体感遥控机械臂仿真-李逍遥说说](http://brightguo.com/wp-content/uploads/2017/03/QQ截图20170321225632-220x150.jpg)
![[转]解决KinectV2驱动问题-李逍遥说说](http://pterneas.com/wp-content/uploads/2017/02/kinect-drivers-update.png)