微軟在發表第一代的 Kinect 後過了快三年,終於在去年、搭配新的 Xbox One 推出的新的 Kinect 感應器。不過,和初代的 Kinect 一樣,第二代的 Kinect 最初也僅只搭配遊戲機使用,沒有 PC 版。
但是由於有了 Kinect For Windows 的經驗,所以微軟這次很快地就把目光放到 PC 市場上,在發表後沒多久,也就開始針對第二代的 Kinect for Windows、也就是「Kinect for Windows v2.0」開放了開發者的預覽版本申請,讓有興趣的開發者可以搶先體驗新版的 Kinect 感應器和 SDK 了!
而也由於這款產品來沒正式上市、目前也僅供有申請的開發者使用(Heresy 知道台灣有幾台了),所以像 Heresy 這樣的一般人,基本上是沒機會玩到、看到的。而微軟這次在台北辦的《Kinect v2.0 台灣首度曝光暨技術研討會》(Facebook 訊息),則比較像是 Kinect v2 的產品正式發布前的展示、推廣活動。
微軟這個活動,是辦在台北信義區的國泰金融大樓(右圖、台灣微軟就在這)的會議廳,交通算是很方便;而只要在線上報名後就可以免費參加了~不用花半毛錢,非常地友善。所以,Heresy 就請公假跑來參加了~
微軟這次則是請來 Kinect 開發團隊的 Michael Fry 和 John McQueen 來做介紹;主題,基本上就是 Kinect for Windows v2 這款新的感應器、以及 SDK 的簡單功能、以及程式 API 架構上的變化簡介了~
場地(左圖)基本上應該算滿大的,而且來的人也很多,可見大家對這塊也都很重視啊~
當然,整個研討會是全程英文的,Heresy 自認應該有聽懂七八成吧?不過,還是不是很有自信,所以…如果接下來的整理內容有問題,就當是 Heresy 聽錯了吧~ XD
一開始,是先介紹微軟的 Kinect 和 NUI(Natural User Interaction、自然使用者互動),然後做一些影片的展示和說明。在實例影片的部分,包括了虛擬試衣鏡、賣場的客戶行為分析(AVA Retail)、產品展示(AUDI)、工作環境設計、健康照護(AIMI)、手術時的非接觸互動介面等等。
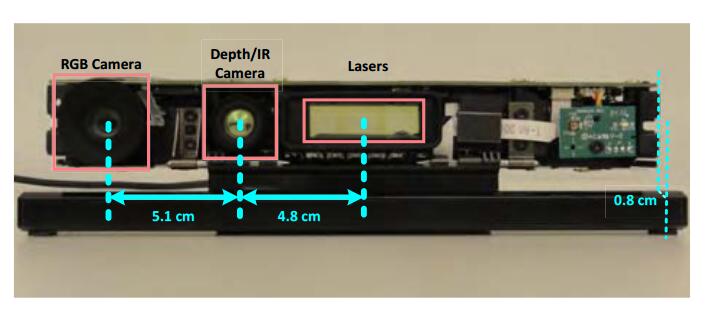
之後,則就是重點、也就是介紹 Kinect v2 的硬體、以及和前一代產品的比較。而雖然講者有實機展示,但是其時展示也相當簡單,基本上和之前 WIRED 的 Xbox One 的介紹影片(YouTube)應該是同樣的程式,沒看過的建議可以先看看影片。
而在 Heresy 來看,這場研討會的一個重點,是微軟終於有提供了一些更詳細的硬體規格了~
首先,Kinect v2 改採用 USB 3.0 介面,還是需要額外供電。K4W 的版本還有一個變壓器。而在主要的硬體規格上,包括了:
- 彩色影像:FullHD(1920 x 1080 @30fps)
- 深度影像:
- 改採 ToF 技術、號稱有三倍的精確度
- 512 x 424 @30fps 的解析度
- 更大的視角,FOV 由 53×47 度變為 70×60 度
- 在 1 公尺左右的距離即可偵測使用者(上一代建議 2 公尺)
- 取消了 Near Mode、使用距離建議 0.5 – 4.5 公尺
- 紅外線影像:
- 解析度和深度影像一樣是 512×424,估計應該是用同一個感應器
- 可以和彩色影像、深度影像同時使用
- 由於深度改採 ToF 技術,所以捕捉到的紅外線影像不會像 PrimeSense 的技術有散斑、畫面很乾淨
- 取消了控制傾角的馬達
其中,最重要的應該還是改採用 ToF 技術的深度感應器。雖然他的解析度為 512×424,比 PrimeSense 的 PS1080(第一代 Kinect 採用的技術)來的低一些,但是其資料的穩定性看來是相對地好、細節也更多;而根據使用者的經驗,他被其他環境光源(紅外線)影響的機率也更低,甚至可以承受一定程度的日光(太強還是不行)!
不過,不管是微軟現場的展示、或是之前 WIRED 的測試影片,都可以看到深度影像的四個角落的深度資訊都相對地差、甚至是全黑的?這點不確定是不是硬體技術的限制?也有與會者有提出這個問題,不過講者他們自身似乎沒注意到有這樣的問題,所以沒有很明確地答案…
在軟體的部分,Kinect for Windows SDK v2.0 基本上是針對 Kinect v2 設計的,僅能針新一代的感應器使用,如果是使用第一代的 Kinect 感應器的話,應該是需要繼續使用舊版的 SDK。
而 v2 SDK 目前還在非常早的階段,開放給使用者的 API,除了原始資料(彩色影像、深度影像、紅外線影像等)的讀取外,就只有基本的骨架分析了~至於展示的骨架方向性、肌肉受力、表情分析等等…基本上現在都還是內部的展示程式的功能,SDK 內並無法使用…(囧)
至於現階段提供的功能,主要就是他現在可以偵測 6 個使用者(含骨架)、25 個關節點;關節點的數量和上一代比起來多了 5 個~由於在手掌這部份現在有三個關節點了,所以也可以在一定的程度上,偵測手的開合狀態,這是相當實用的!
另外,比較重要的一點,是 v2 SDK 把深度影像分析的計算、丟到顯示卡上去做(應該是 Direct Compute 吧)了~所以以後要執行 Kinect v2 的程式的話,應該是會需要好一點的顯示卡了;不過理論上,Intel 較新的 IGP 應該也是可以運作的。像是講者現場展示所使用的就是使用 Intel IGP 的筆記電腦,雖然更新率上不了 30、只有 1x 左右,但是至少是可以運作的。
其他,在 v2 SDK 上的細節,還有:
- 改採用 Source / Reader 的架構
- 將 Player Index 從深度資訊內移除,以後處理深度資訊會更單純
- 提供額外的 Body Index 資料來源、1byte
- 移除了一些 v1 設定的選項(例如 near mode、解析度設定)
- 使用 helper class 來做畫面同步、座標轉換(現有 SDK 版本的畫面似乎在同步上有問題)
基本上,大概就是這樣了吧~
目前微軟方面應該也還沒有一個詳細的時程,不過有可能會在今年夏天後發布吧?接下來,就慢慢等吧。不過價錢破萬…Heresy 這邊要入手的難度似乎變高不少啊…
最後,零星幾點補充:
- 心跳偵測是有醫學依據的,是採用臉部的彩色影像些許的變化作分析,所以如果動作是會影響到判斷的。
- 展示的近些分析功能之後會不會放到 SDK 可能還是未知數。
- 別人的紀錄: 《“Kinet for Windows” presented by Michael Fry and John McQueen【Kinect v2.0 台灣首度曝光暨技術研討會】》
- 會場的點心數量還滿多的,早知道就不要吃午餐了(毆


![[转]matlab自带相机标定程序对kinect进行简单标定-李逍遥说说](https://ws1.sinaimg.cn/large/005HYjuQly1fijj7qtsu3j30c207dq5o.jpg)


![[转]利用Kinect把任意屏幕变得可触控-李逍遥说说](https://brightguo.com/wp-content/uploads/2017/04/o_wite-220x150.png)
![[转]深度图像的获取原理-李逍遥说说](https://brightguo.com/wp-content/uploads/2017/04/20170406100208362-220x150.png)


